skip to main content
Positions Available
Strategic Plan
Directory
Resources
Resources
Faculty Resources
Postdoctoral Scholar Resources
Office of EAS Programs for Student Success
Staff Resources
Alumni
Vibrations: EAS Community Newsletter
ENGenuity: Alumni Newsletter
ENGenious Publication
Contact Us
Contact Us
EAS Directory
EAS Leadership & Staff
GIVE
Division of
Engineering and Applied Science
About
Open About submenu
Positions Available
Strategic Plan
Visit Us
Support EAS
People
Open People submenu
Faculty
Emeritus
Research Faculty
Teaching Faculty
Lecturers
Members of the Professional Staff
Moore Scholars
EAS Leadership and Staff
EAS Directory
Departments
Open Departments submenu
Aerospace (GALCIT)⇗
Andrew and Peggy Cherng Department of Medical Engineering⇗
Applied Physics and Materials Science⇗
Computing and Mathematical Sciences⇗
Electrical Engineering⇗
Environmental Science and Engineering⇗
Mechanical and Civil Engineering⇗
Research
Open Research submenu
Centers
Academics
Open Academics submenu
Graduate Education⇗
Undergraduate Education
Executive Education⇗
Catalog⇗
E/SEC Schedule
E/SEC Courses Descriptions
Summer Programs
Awards and Prizes
Open Awards and Prizes submenu
New Horizons Award
EAS Chair's Scholars Program⇗
EAS Trailblazers⇗
Henry Ford II Scholar Award
Richard Bruce Chapman Memorial Award
Demetriades - Tsafka - Kokkalis Prizes⇗
Northrop Grumman Prize for Excellence in Teaching
Community
Open Community submenu
Vibrations Newsletter
ENGenuity: Alumni Newsletter⇗
EAS Remembers
News
Events
Open Events submenu
Seminars
Distinguished Lectures
EAS Trailblazers Symposium⇗
Electric Vehicles
Search
Search
Menu
Close
About
Open About submenu
People
Open People submenu
Departments
Open Departments submenu
Research
Open Research submenu
Academics
Open Academics submenu
Community
Open Community submenu
News
Events
Open Events submenu
Positions Available
Strategic Plan
Directory
Resources
Resources
Faculty Resources
Postdoctoral Scholar Resources
Office of EAS Programs for Student Success
Staff Resources
Alumni
Vibrations: EAS Community Newsletter
ENGenuity: Alumni Newsletter
ENGenious Publication
Contact Us
Contact Us
EAS Directory
EAS Leadership & Staff
GIVE
About
Back
Positions Available
Strategic Plan
Visit Us
Support EAS
People
Back
Faculty
Emeritus
Research Faculty
Teaching Faculty
Lecturers
Members of the Professional Staff
Moore Scholars
EAS Leadership and Staff
EAS Directory
Departments
Back
Aerospace (GALCIT)⇗
Andrew and Peggy Cherng Department of Medical Engineering⇗
Applied Physics and Materials Science⇗
Computing and Mathematical Sciences⇗
Electrical Engineering⇗
Environmental Science and Engineering⇗
Mechanical and Civil Engineering⇗
Research
Back
Centers
Academics
Back
Graduate Education⇗
Undergraduate Education
Executive Education⇗
Catalog⇗
E/SEC Schedule
E/SEC Courses Descriptions
Summer Programs
Awards and Prizes
New Horizons Award
EAS Chair's Scholars Program⇗
EAS Trailblazers⇗
Henry Ford II Scholar Award
Richard Bruce Chapman Memorial Award
Demetriades - Tsafka - Kokkalis Prizes⇗
Northrop Grumman Prize for Excellence in Teaching
Community
Back
Vibrations Newsletter
ENGenuity: Alumni Newsletter⇗
EAS Remembers
Events
Back
Seminars
Distinguished Lectures
EAS Trailblazers Symposium⇗
Electric Vehicles
Search
Search
Search
Close
Search
Categories
Applied Physics
Applied Physics and Materials Science
Computing and Mathematical Sciences
Electrical Engineering
Environmental Science and Engineering
GALCIT
Materials Science
Mechanical and Civil Engineering
Medical Engineering
Tags
aerospace
alumni
awards and honors
Caltech infrastructure
centers
CMS
competitions
computer & information science
EAS
EAS history
energy
engineering
environment & sustainability
events
faculty profile
Graduate school rankings
health
JPL
materials science
postdocs
quantum science
teaching
Year
Search
August 18, 2025
How Caltech Launched a Leading AI Conference
August 13, 2025
Using Sound to Remember Quantum Information
August 12, 2025
Andrei Faraon Named Director of Kavli Nanoscience Institute
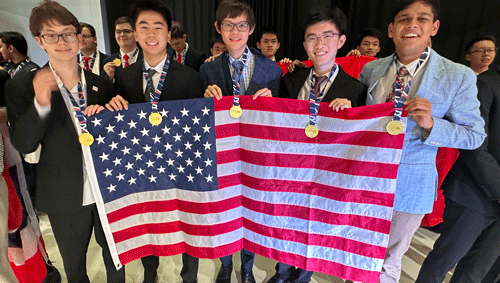
August 4, 2025
US Physics Team Wins International Olympiad
August 1, 2025
Bringing Metallurgy Into the 21st Century
July 23, 2025
Seeing the Whole Board: How Caltech Is Using AI to Advance Scientific Discovery
July 17, 2025
Two Alumni Honored with Prizes for Innovative Usage of AI
July 10, 2025
Adding Up Feynman Diagrams to Make Predictions about Real Materials
July 7, 2025
The Roots of Neural Networks: How Caltech Research Paved the Way to Modern AI
June 30, 2025
AI-Assisted Technique Offers Safe, Effective, Painless Breast Imaging Alternative
June 27, 2025
New "Smart Capsule" to Study the Health of the GI Tract
June 24, 2025
Making Plastic from Carbon Dioxide, Water, and Electricity
⟨⟨
1
2
3
4
5
-⟩
⟩⟩
Video Lightbox